DIY Power Amplifiers
For DIY Stereos & Home Theatre
Build your own audiophile audio gear for a fraction of the cost of commercial gear.
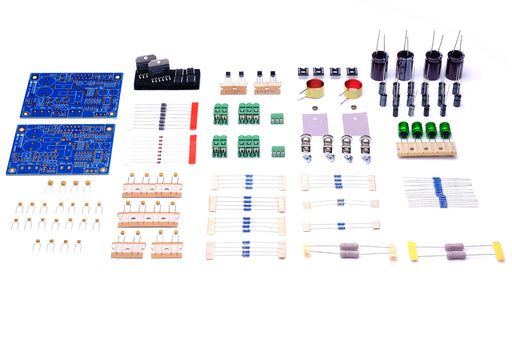
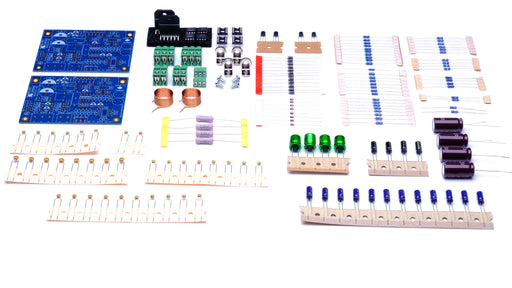
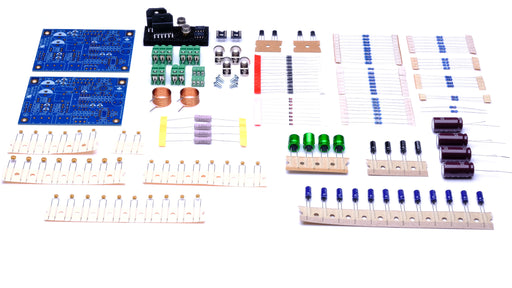
This kit contains the circuit boards and all the parts needed to build two Modulus-86 amplifier modules. Build difficulty (1-5): 2 (easy-to-modera...
View full detailsThe Modulus-286 is a 125 W, Class-AB, LM3886-based power amplifier with error correction provided by an LM4562 precision opamp. It delivers clear, ...
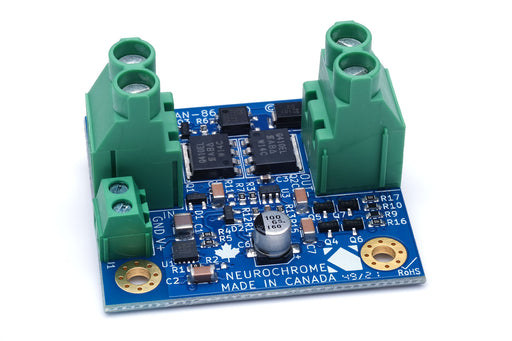
View full detailsThe Guardian-86 is a high-end protection circuit designed to protect speakers against two common ways that power amplifiers can misbehave: Sharp v...
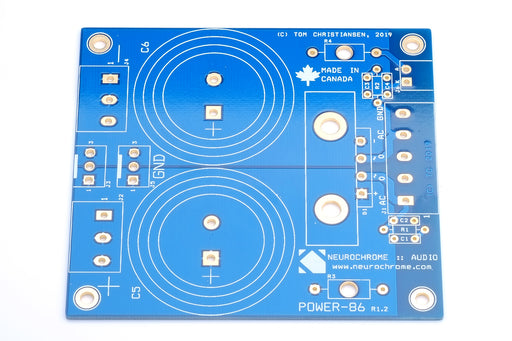
View full detailsThe Power-86 Power Supply Board is a companion board for the state of the art Neurochrome composite amplifiers. The intended use is for one Power-8...
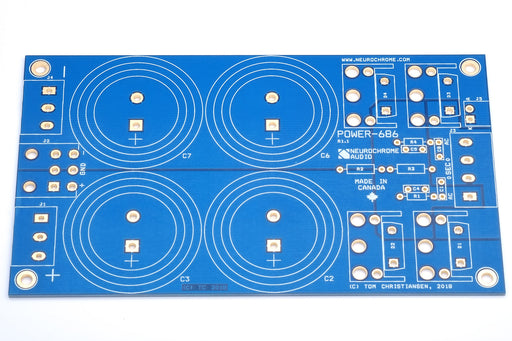
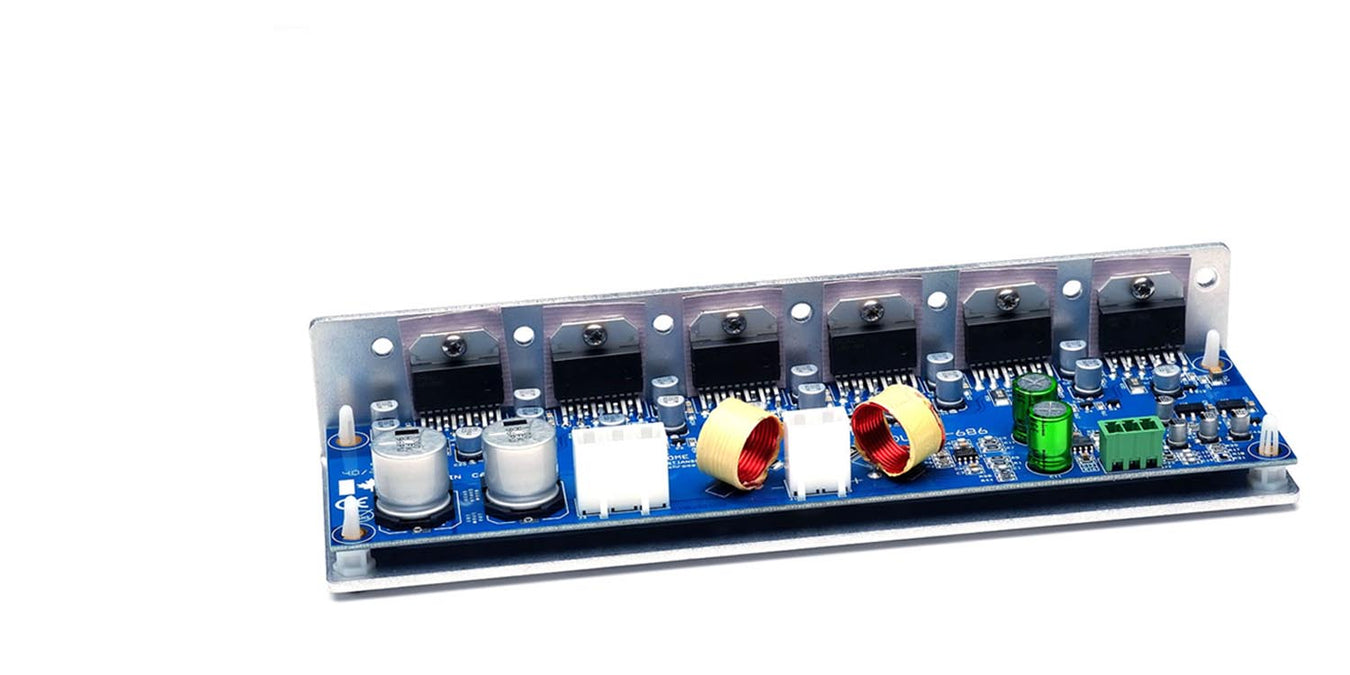
View full detailsThe Power-686 is a power supply intended for use with the Modulus-686 power amplifier and similar high-power amplifiers. This power supply provides...
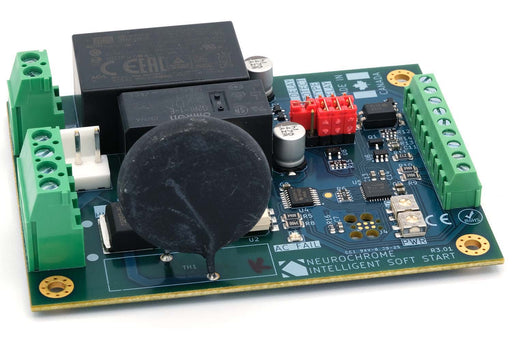
View full detailsThe ISS is designed as a companion board to the Power-686 and Power-86 power supply boards. It is equally well suited for use with other power supp...
View full detailsChassis for Modulus-86 Rev. 3.0, Modulus-186, and Modulus-286. All mounting hardware needed to assemble the chassis and attach the circuit boards w...
View full detailsThe Modulus-86 is a 65 W, Class-AB, LM3886-based power amplifier with error correction provided by an OPA627 precision opamp. It delivers clear, pr...
View full details